Lunar Scavenger Robot
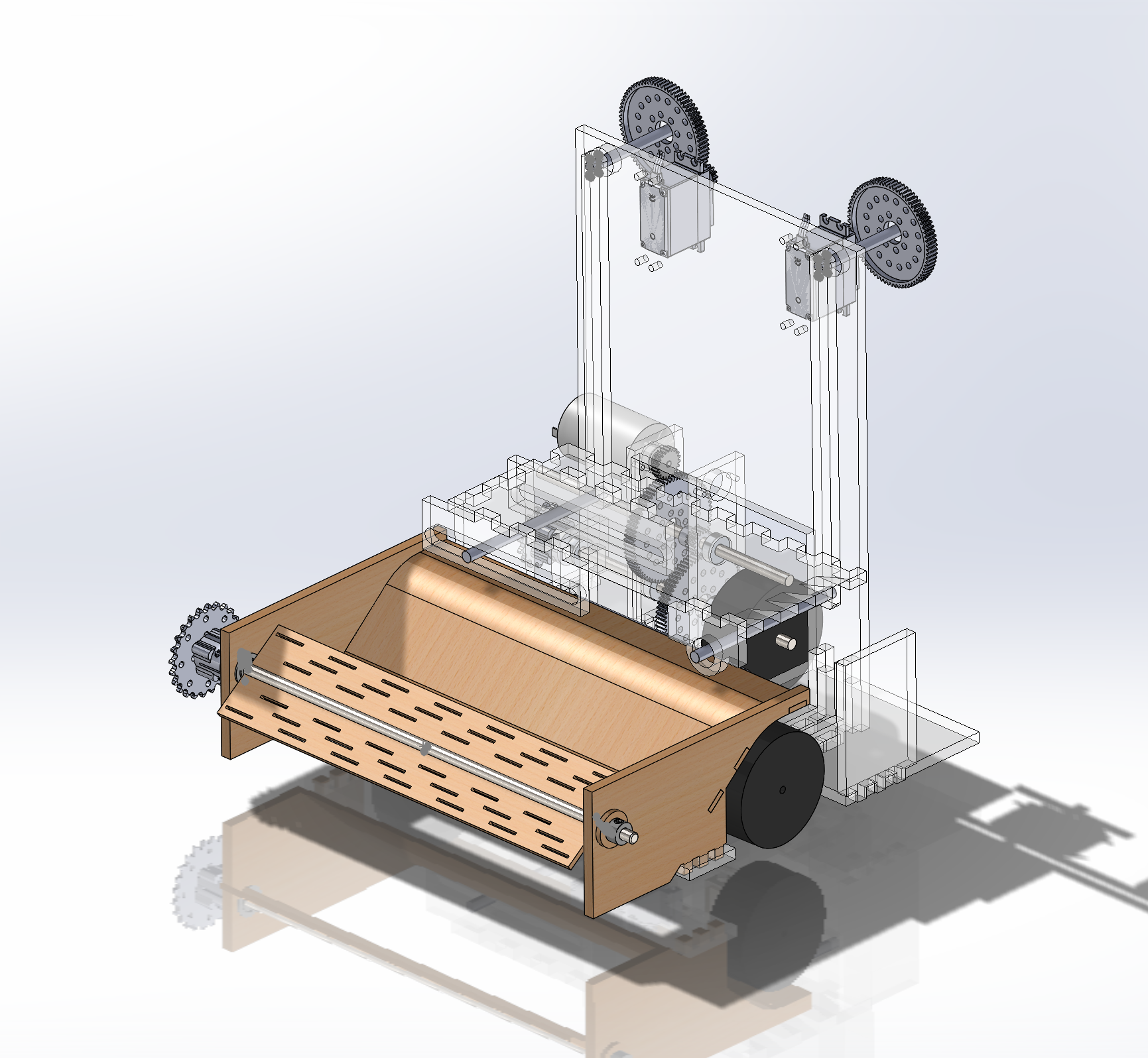
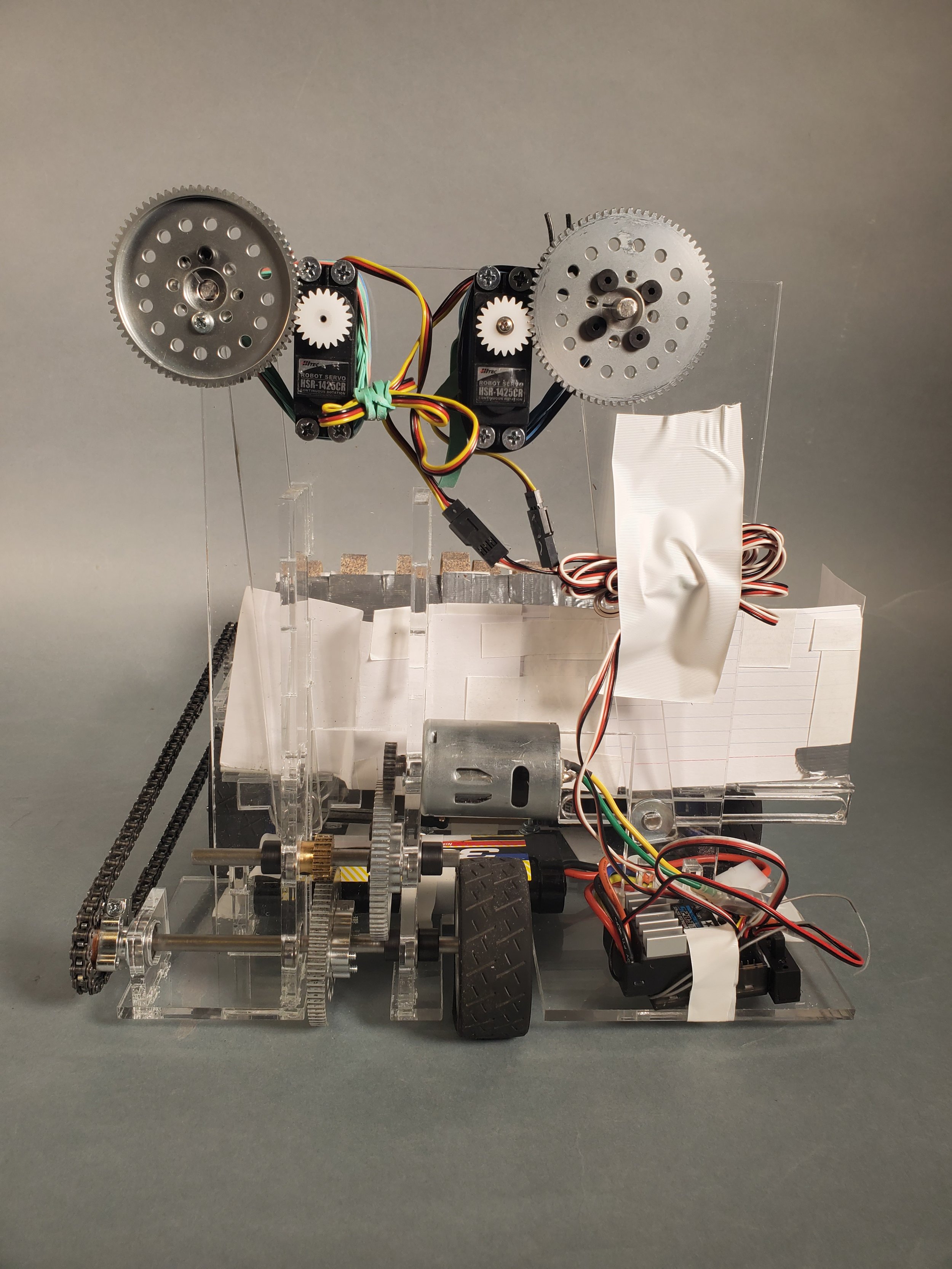
Within teams of three to five, our goal was to design and fabricate a joystick-controlled machine that is able to navigate a lunar landscape playing field, retrieve objects, and then deposit said objects into receptacles. Utilizing SolidWorks and Thayer’s machine shop, we designed a robot that is able to lift objects above 15 inches, a driving mechanism that allowed tight turns, and a lightweight chassis to minimize weight.
-
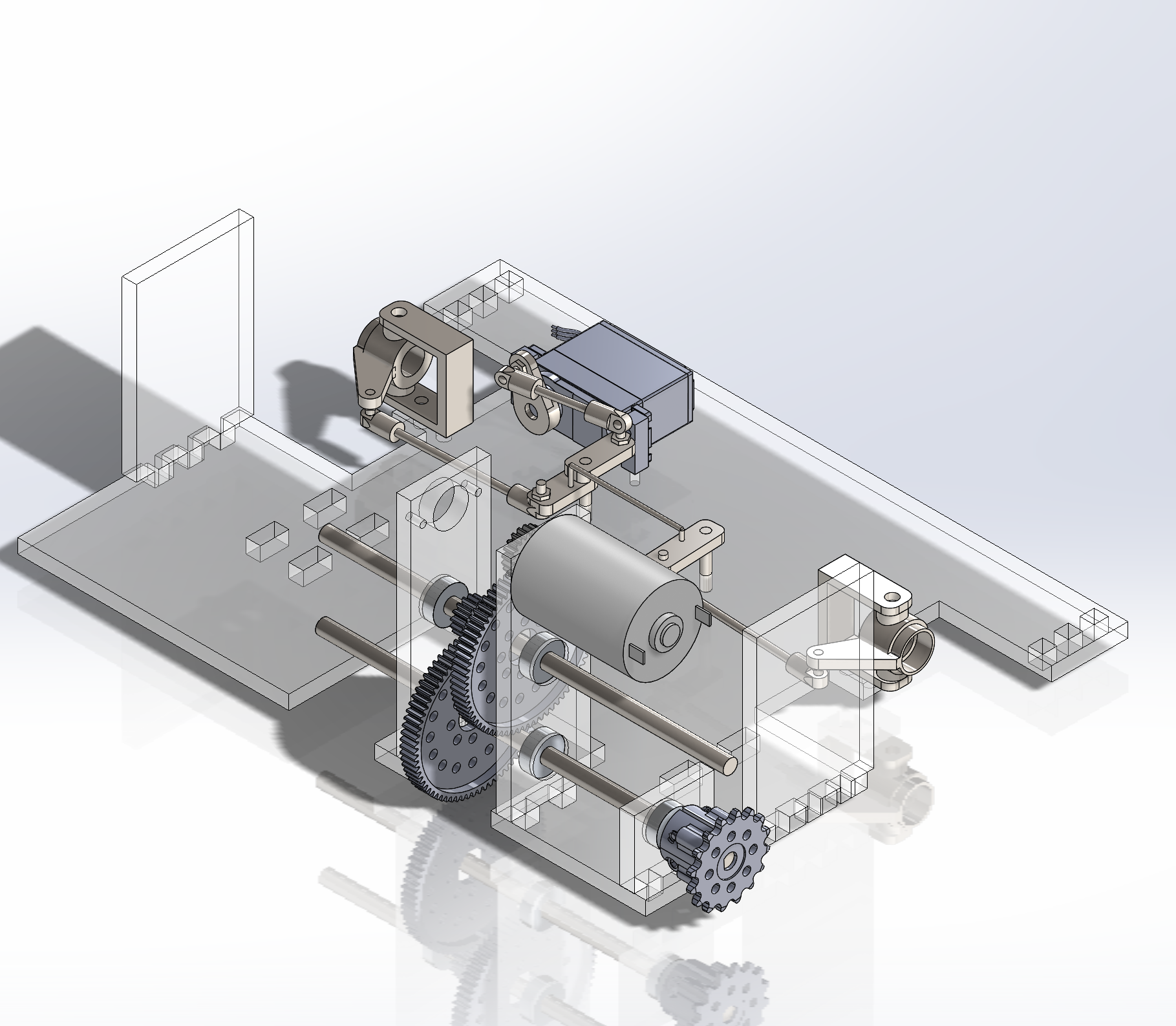
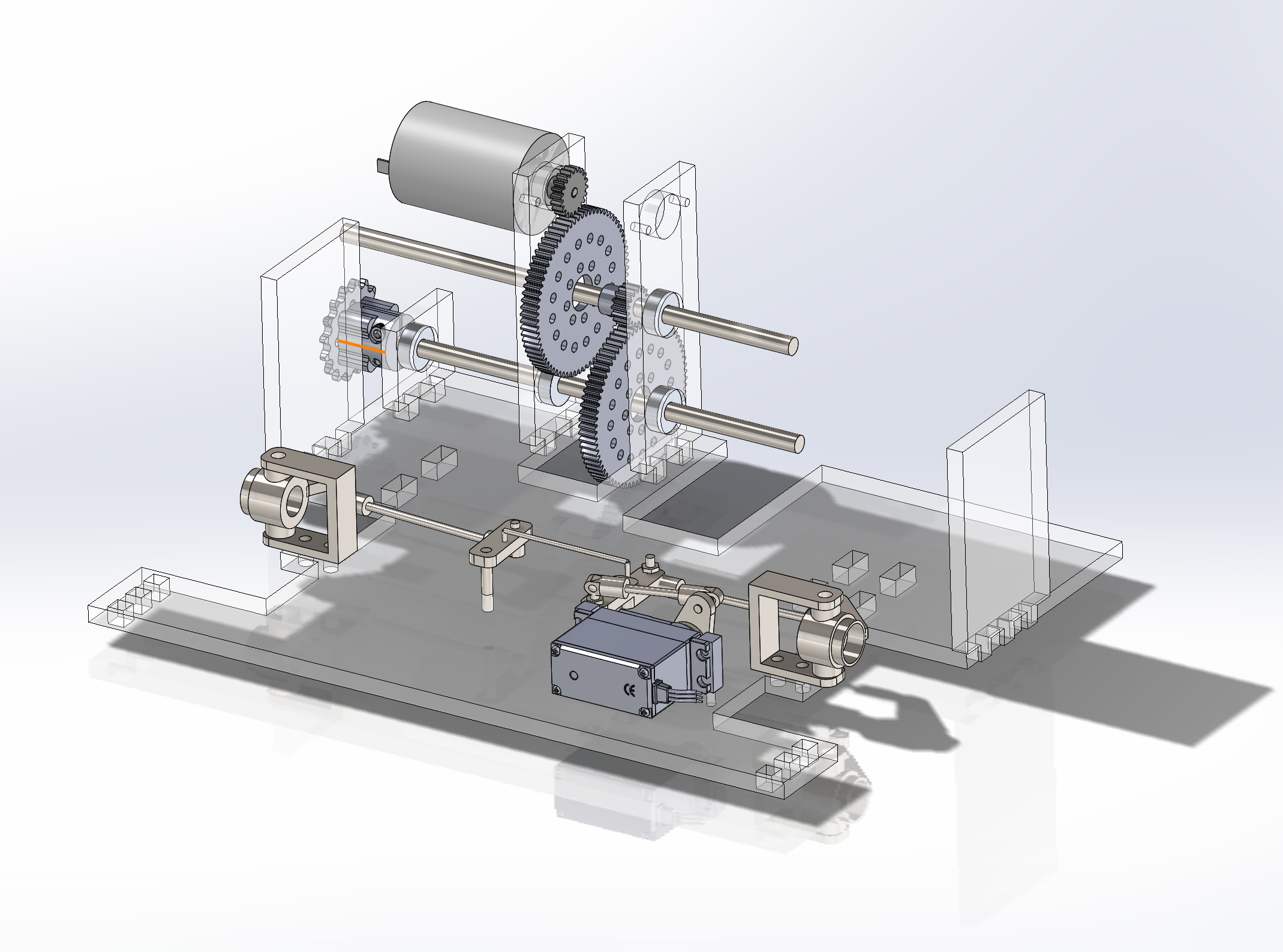
Responsible for the Chassis and Gearbox design, I not only had to take into consideration how my group members’ components would interact with one another but also weight and size constraints. I chose to design a module cutout acrylic chassis design, that was lightweight and could accommodate my team members’ components. Additionally, having calculated we needed to have a velocity ratio of 15 to bring down an RPM of 14500 to 98, I designed a gearbox with a velocity ratio of 16.2.
-
As I was responsible for manufacturing these designs, I would take the initial drawings, design them in SolidWorks, and then create CAD drawings from which I could refer to when manufacturing them. Due to the nature of the project, my expertise in SolidWorks improved significantly to the point where I received the SolidWorks CSWA certificate.
-
As I was responsible for the chassis of the robot, it was my job to also be responsible that all the parts would mesh together. Thus, I created the final assembly of the robot that had over 75 individual components.